PromptPay





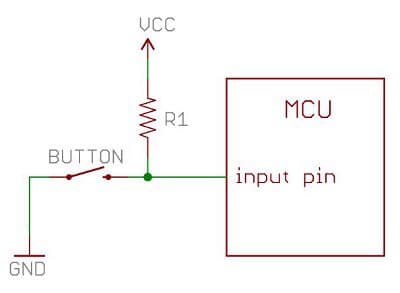
คือการต่อ ตัวต้านทานที่ขา input ของไมโครคอนโทลเลอร์ เหตุผลที่ต้องต่อคือ ถ้าเราต่อสวิตส์หรือ เซนเซอร์ต่างๆ เข้ากับไมโครคอนโทรเลอร์ตรงๆ อย่างเดียว อาจจะทำให้เกิดสัญญาณรบกวนได้ในกรณีที่ input ถูกลอยขาไว้ ไม่ได้จ่าย logic high หรือ low เช่น การต่อสวิตส์ ถ้าเรากดสวิตส์ จะทำให้มี logic high จ่ายให้กับ input ของไมโครคอนโทลเลอร์ แต่ถ้าเราปล่อยสวิตส์ ทำให้ ขา input ถูกลอยไว้ ไม่ได้ต่อลงกราวหรือ logic low ดังนั้นจึงต้องต่อ Pull up, Pull down เพื่อให้แน่ใจว่าเป็น logic high หรือ low เสมอ ถึงแม้ว่าจะไม่มี input ป้อนเข้ามา
Pull up คือ การต่อตัวต้านทานจาก vcc เข้ากับ input ของ ไมโครคอนโทลเลอร์ ดังรูป
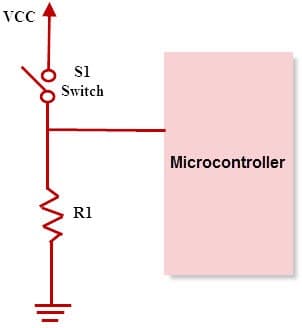
Pull down คือการต่อ ตัวต้านทาน จาก input ของไมโครคอนโทลเลอร์ เข้ากับ กราว ดังรูป
ช่วงดึกเมื่อวานนี้ (5 มิ.ย. 2562) ได้มีการโหวตเลือกนายกรัฐมนตรีคนที่ 30 ของประเทศไทย โดยผลการโหวต พล.อ.ประยุทธ์ จันทร์โอชา แคนดิเดตนายกฯ ที่ถูกเสนอชื่อโดยพรรคพลังประชารัฐ ชนะด้วยเสียงสนับสนุนจาก ส.ส. และส.ว. รวมกัน 500 คะแนน ขณะที่นายธนาธร จึงรุ่งเรืองกิจ แคนดิเดตนายกฯ ฝั่ง 7 พรรคประชาธิปไตย ได้เสียงสนับสนุน 244 คะแนน ซึ่งมีรายละเอียดของคะแนนมีดังนี้
สวัสดีครับ ในบทความนี้ก็เป็น EP.11 แล้วนะครับ โดยเนื้อหาจะเป็นเรื่องเกี่ยวกับ Panic คืออะไร ใช้ทําอะไร และมีวิธีการใช้อย่างไรสําหรับท่านใดที่ยังไม่ได้อ่าน EP.10 ท่านสามารถกลับไปอ่านก่อนได้นะครับที่นี่ Go EP.10 Defer ในภาษา Goมาเริ่มเรียนรู้ไปด้วยกันตามหัวข้อด้านล่างเลยครับ
วิธีการ config ให้ raspberry pi รัน application ที่มี gui(แบบมีหน้าจอ) โดยอัตโนมัติ ทุกครั้งที่เปิดเครื่อง มีขั้นตอนคือ